Home
CV
Contact
AlcOpt
Puzzle Bot
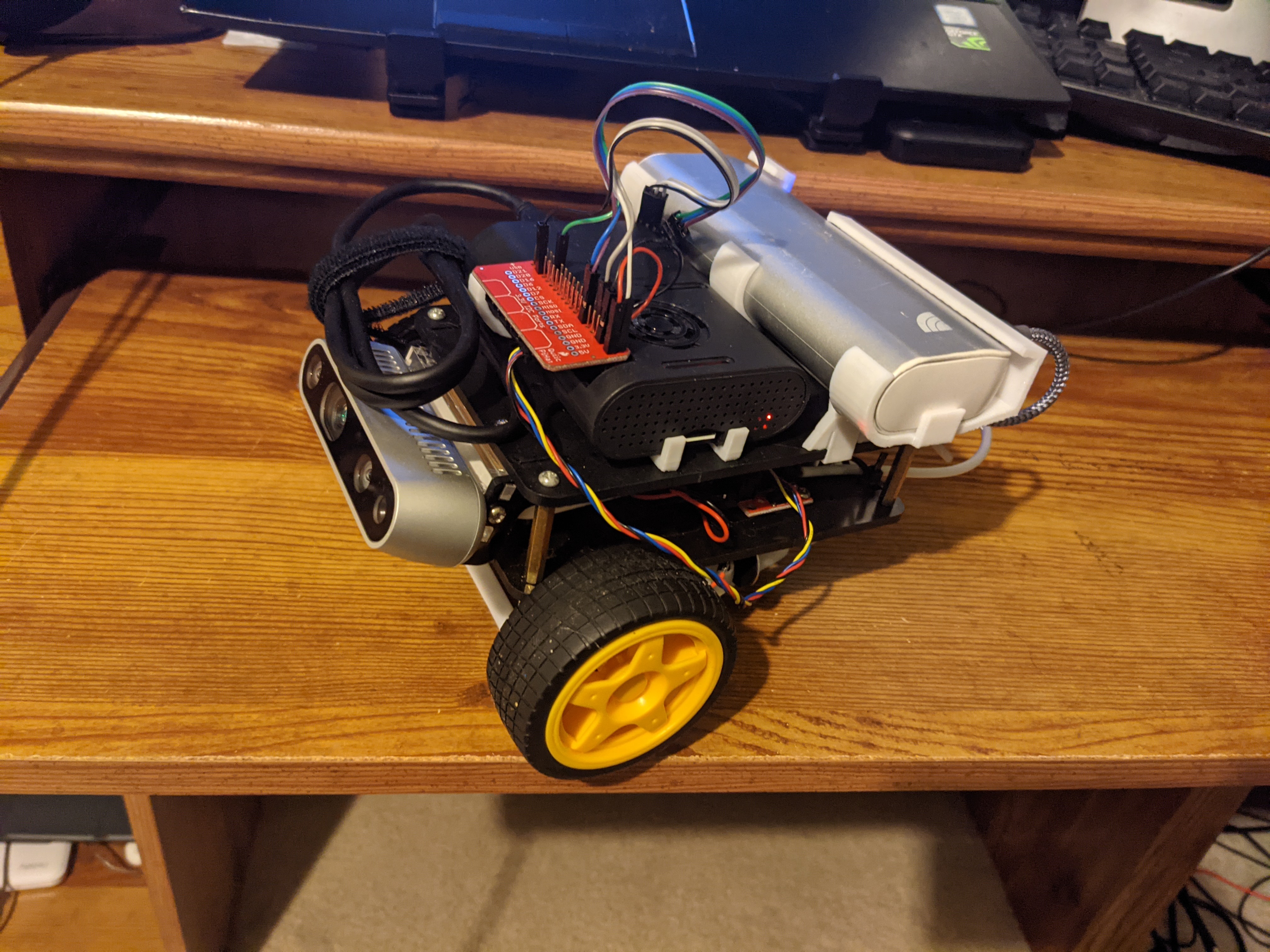
SLAM* Bot
SLAM* Robot
Localization and mapping using a 2-wheeled robot
Your browser does not support the video tag.